视觉算法技术在商用车安防运维领域的规模化应用
自2013年创始之初,中天安驰一直根植于视觉算法的底层研究。
我们持续视觉算法的科研投入,以ADAS和DSM应用技术为核心, 在算法迭代、算力升级、数据挖掘三个方面不断优化。我们将机器视觉技术,规模化商业应用于智能运输解决方案。截止2021年春季,我们的算法已经运行在超过50万台车载终端上,显著提升驾驶安全和运维效率。同时,海量的有效驾驶行为数据和驾驶环境数据又为机器学习、算法迭代提供了重要基础。
我们算法核心技术
快速检测分割框架(Faster)
技术内容说明
基于大数据对目标位置大小进行统计分析,缩小检测范围,提高检测速度。应用分治法把图像化整为零,训练多个简单模型,进一步提高检测效率。
技术价值及壁垒
一台设备上可同时运行FCW、LDW、PCW、TSR、DSM、BSD等多个功能,可通过0.6秒实时分析实现提前2.7秒预警,碰撞事故率降低85%。
智能数据处理系统(Smarter)
技术内容说明
在不增加额外成本的前提下,通过影子模式和自动化数据处理系统,从海量原始数据中自动挑选出高价值的样本,满足模型迭代训练需求。
技术价值及壁垒
每天完成数十亿样本的线上实时筛选和线下自动筛选,精准度高,不增加成本,不影响正常产品工作。
基于驾驶的数据挖掘(Rockman)
技术内容说明
利用各种传感器感知人、车、路的状态,以驾驶员为主体,深入分析各项指标的相互影响,为客户提供全方位的可视化分析报告,包括用户画像、驾驶评分、疲劳检测、事故检测等。
技术价值及壁垒
拥有领先同业的海量数据(道路里程数据达300亿公里,数据库规模超过10亿张),为挖掘提供必要的前提,形成数据-算法优化的正向循环。
ADAS
ADAS
DSM Fatigue drive
我们的技术路线,在以下方面深研
快速视觉感知 - Faster vision Perception
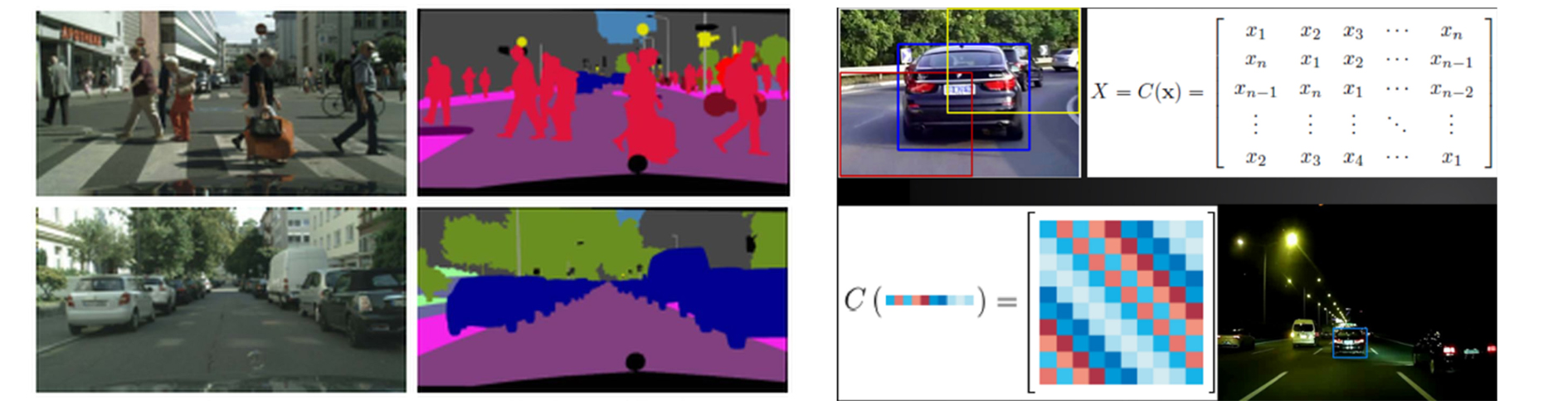
1、动态道路交通场景理解。交通场景下,车辆、人等参与者和交通设施的位置、大小、运动轨迹和行为等都有一定规律。从规律中挖掘规则模式和行为模式,将挖掘到的模式注入到深度学习检测框架中,可以显著减少计算量,同时提升目标检测的召回率和准确率。
2、基于海思NNIE的神经网络架构搜索。在NNIE的硬件规格下,单层的计算量、网络层数、特征图尺寸和输入输出维度都影响硬件利用率。以NNIE耗时为优化目标,运用NAS技术搜索可以充分利用MAC计算性能的网络结构,提升边缘端的硬件利用率。
3、多任务感知。对于运动目标、静止目标、道路标识和交通信号灯标识等多识别任务,任一识别错误,都可能导致灾难性后果。采用多任务模型,实现感知任务拆分,感知优先级细分,感知环境共享,从而实现紧急状况优先快速反应,周围环境精细感知。
4、视频行为识别。识别驾驶员行为容易受个体习惯差异、摄像头安装位置、光线、口罩等影响。疲劳和向下瞟仪表盘为例,用单帧图像无法区分,只能用视频中时序上的变化判断。
智能数据引擎 - Smarter Data Engine
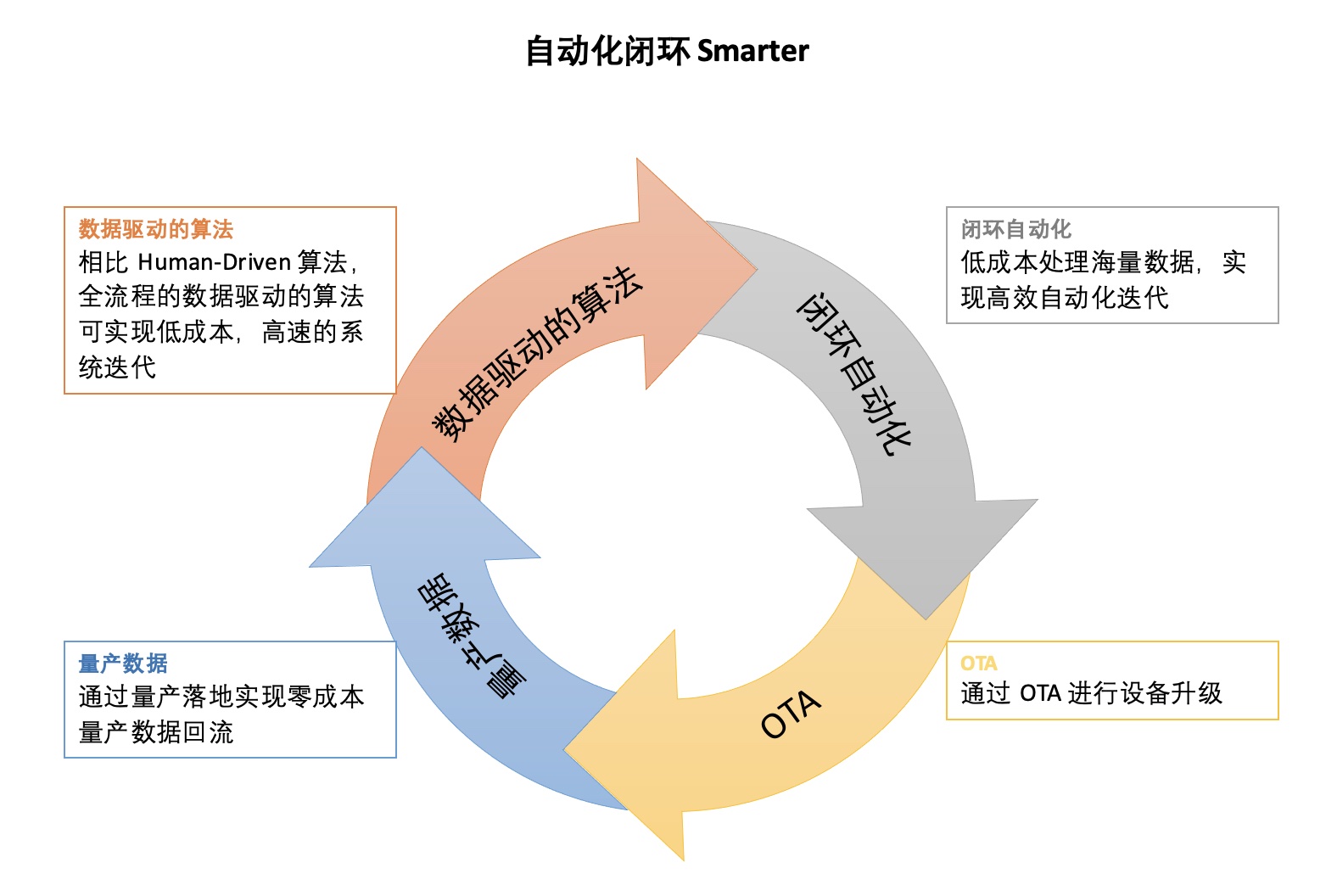
1、构建自动化大闭环。闭环自动化可以减少重复劳动,提升产品研发迭代效率,打通整个研发迭代流程。智能数据引擎是构建从数据采集、数据存储、数据标注、模型训练、测试验证到OTA部署这一视觉感知自动化大闭环的关键。
2、车端筛选,有效应对长尾效应。数十万车载边缘计算节点每天可精准处理数十亿驾驶数据,收集所需的不准确的、不确定的、指定的Corner cases和Specified cases,可以有效覆盖长尾样本。数十万边缘节点的车端筛选能力相当于1000GPU hours,可以显著降低数据成本。
3、Shadow Mode搜集真实数据。智能数据引擎以Shadow Mode运行在后台,在不影响产品性能和生产环境的前提下,搜集实时运行数据,用于搭建以真实数据为支撑的算法验证和无人驾驶仿真环境。
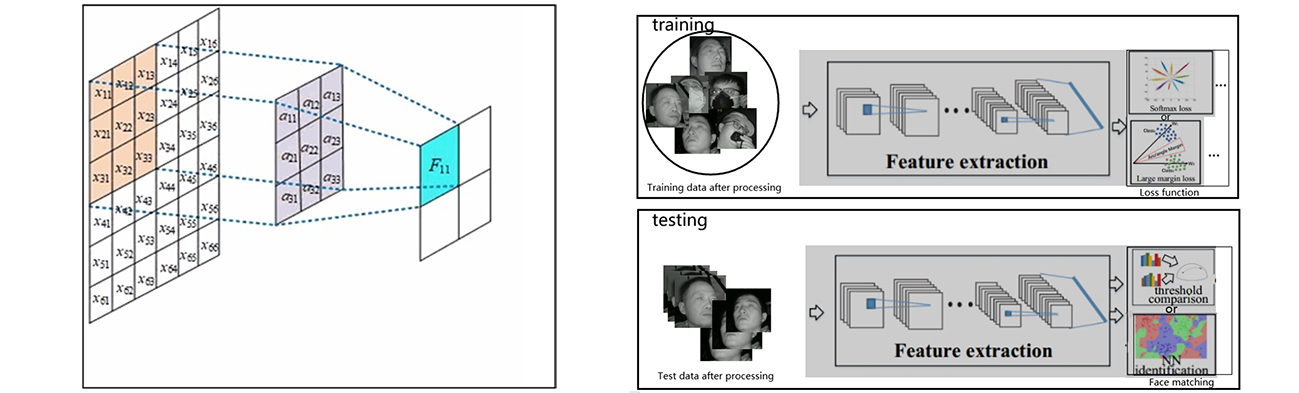
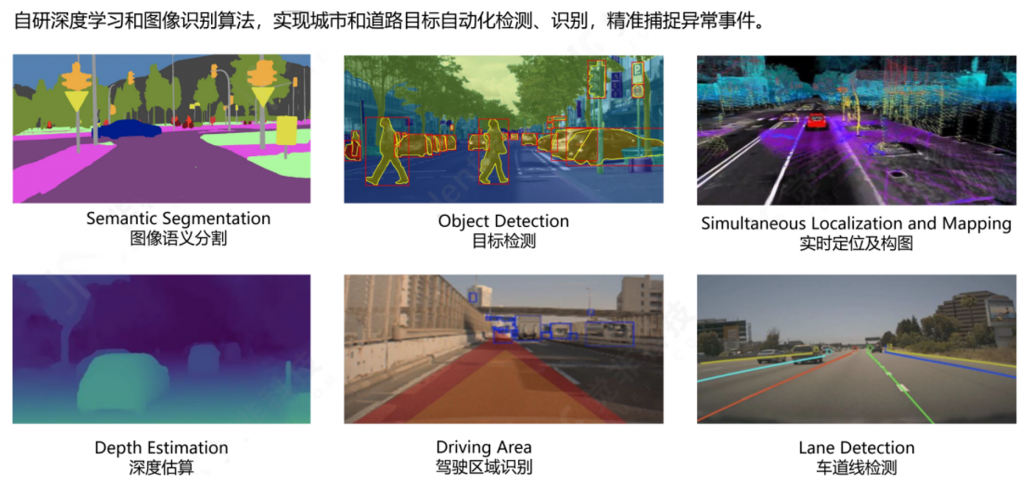
独立自主研发针对汽车应用场景的人工智能图像识别算法; 基于深度学习的特征分类特性,提出在机器学习的固定特征基础上实现多层次、多元化的框架,极大降低特征训练的时间,满足对运算性能严格要求。
智能运输解决方案 - Intelligent Transportation Solution
智能运输解决方案将信息技术、数据通信技术、计算机技术、人工智能等技术综合运用于交通运输领域,加强车辆、道路、运营之间的联系,进而保障行车安全、提高运输效率、节约运营成本。
1、高迁移性的核心功能。目前智能运输解决方案广泛应用于客运、货运、出租和公交等行业,使用行车轨迹追踪、车辆驾驶安全提前预警、驾驶员状态监控、驾驶员身份认证、车辆智能调度等核心功能模块,可以涵盖大多数运输行业的业务需求,有效解决车辆调度管理无序、运营单位管理不力、效率低等问题。核心功能模块具有良好的通用性和可扩展性,也使相关的数据收集、算法升级变得更高效更便捷。
2、针对性应对特有需求。为了满足细分领域的特有需求,开发了针对性的功能,例如根据货运车中特种车的特点,开发了车厢举升和密闭识别、指定行车路线、货物偷盗预警等功能;根据客运车的需求,开发了车内人员监控记录等功能。
3、场景理解,快速部署。深入理解应用场景,针对不同运营环境、车辆,挖掘特定场景下的共性与差异性,构建一套可基于核心模块便捷扩展的解决方案,兼顾通用功能与特有功能,方便在不同场景下快速集成部署。
我们的常见规模落地的ADAS技术:前车碰撞预警(FCW)、车道偏离预警(LDW)、盲区监测预警(BSD、行人检测)
白天快速靠近前车
夜晚快速靠近前车
前方车辆变道
白天车距过近
夜晚车距过近
雨衣行人
撑伞行人
我们的常见规模落地的DSM驾驶员监控技术:监测疲劳驾驶、打电话分心驾驶、吸烟驾驶
各种驾驶预警
哈欠疲劳预警
驾驶打电话预警
商用车综合解决方案
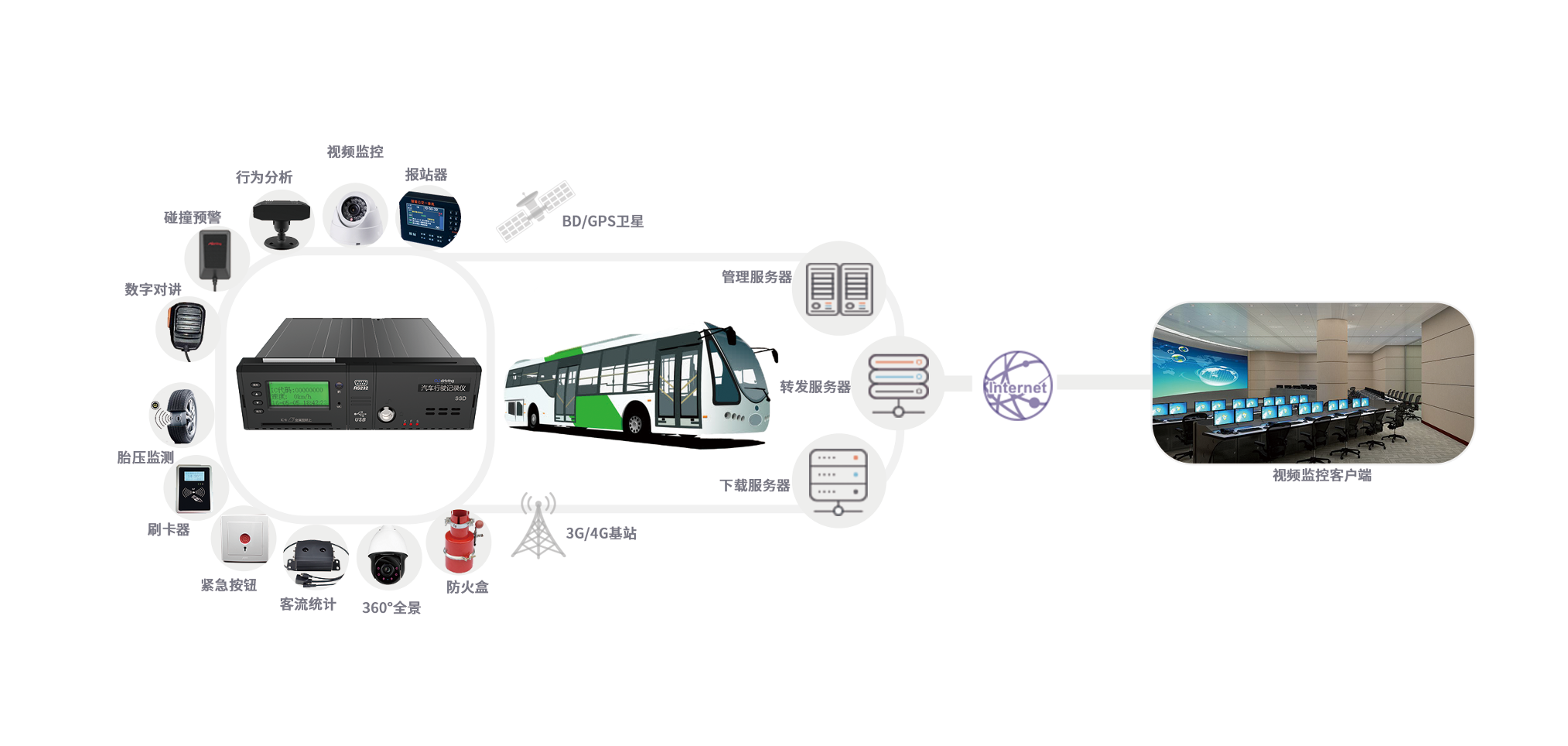
公交车解决方案
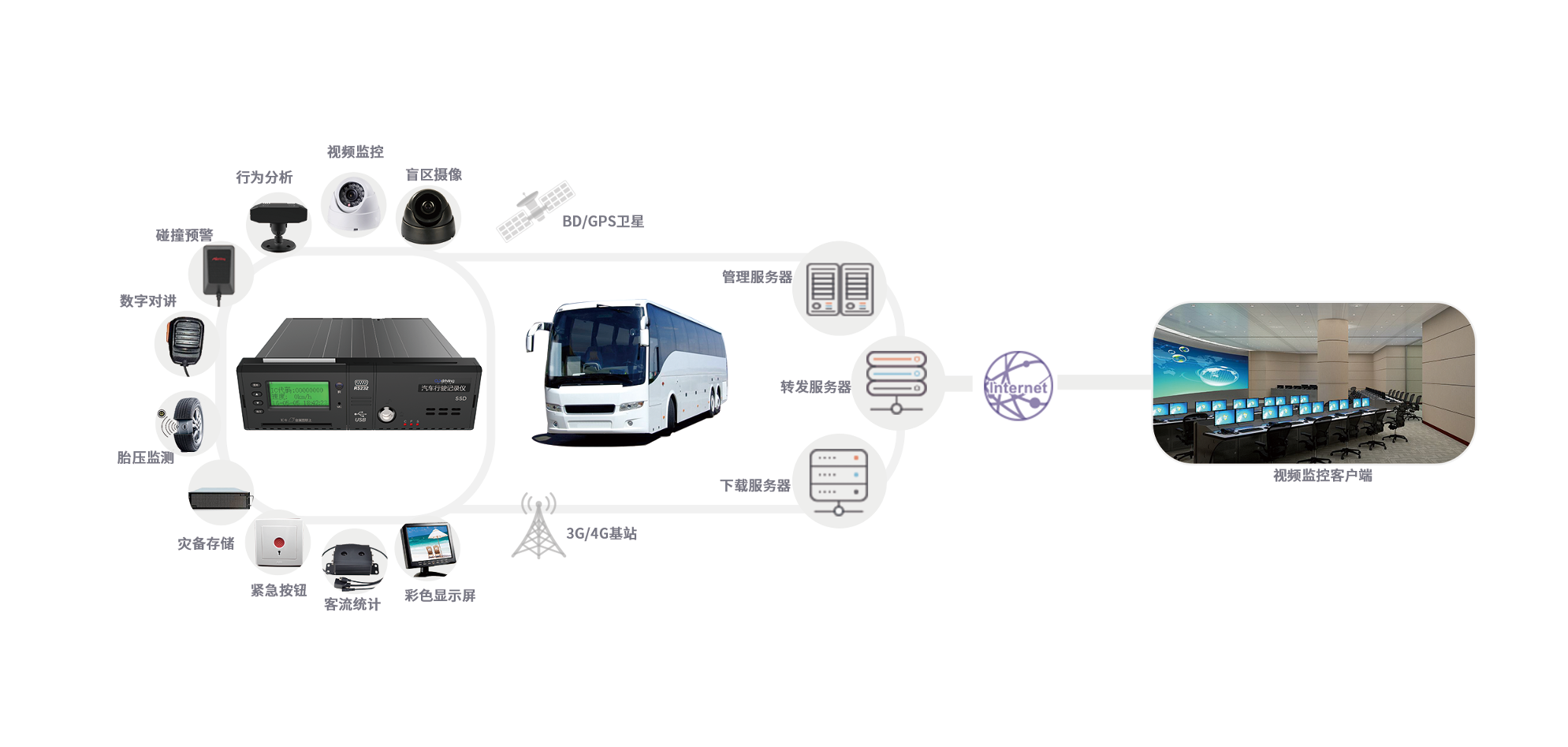
客运车解决方案
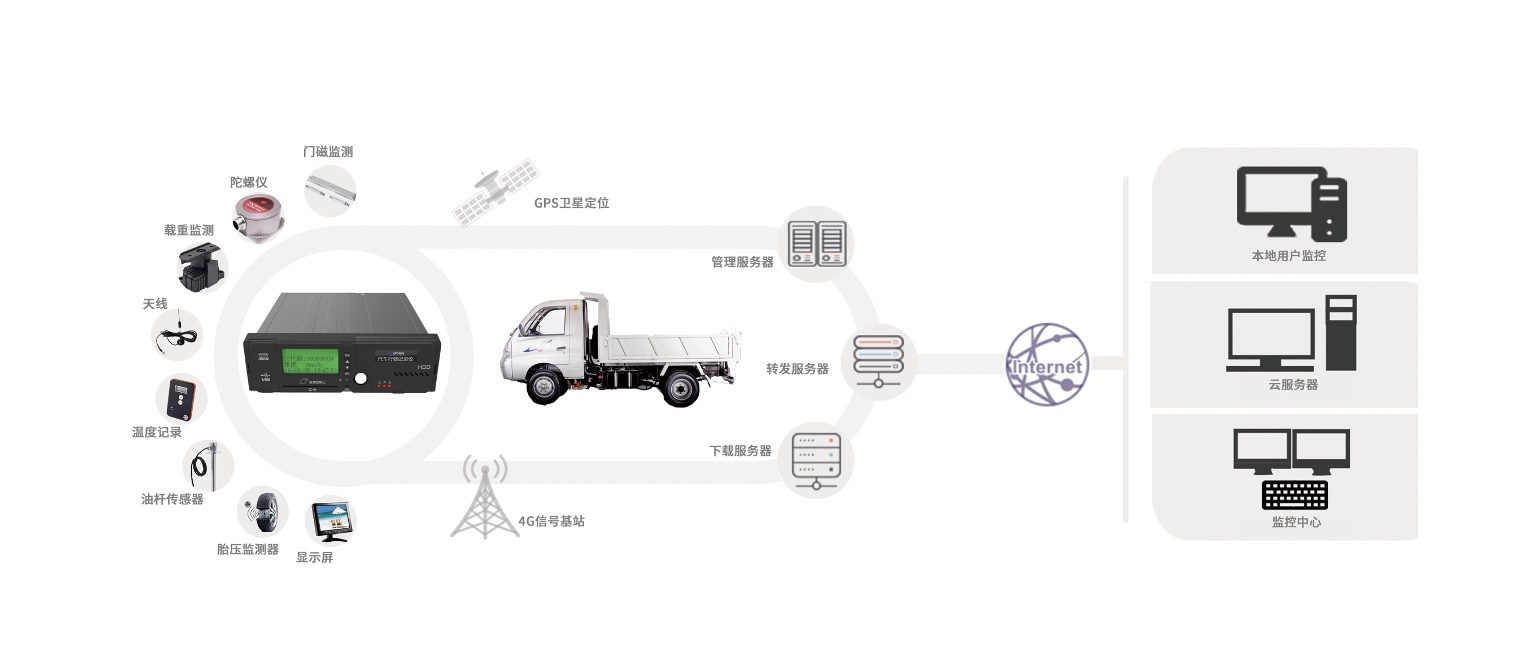
货运车解决方案
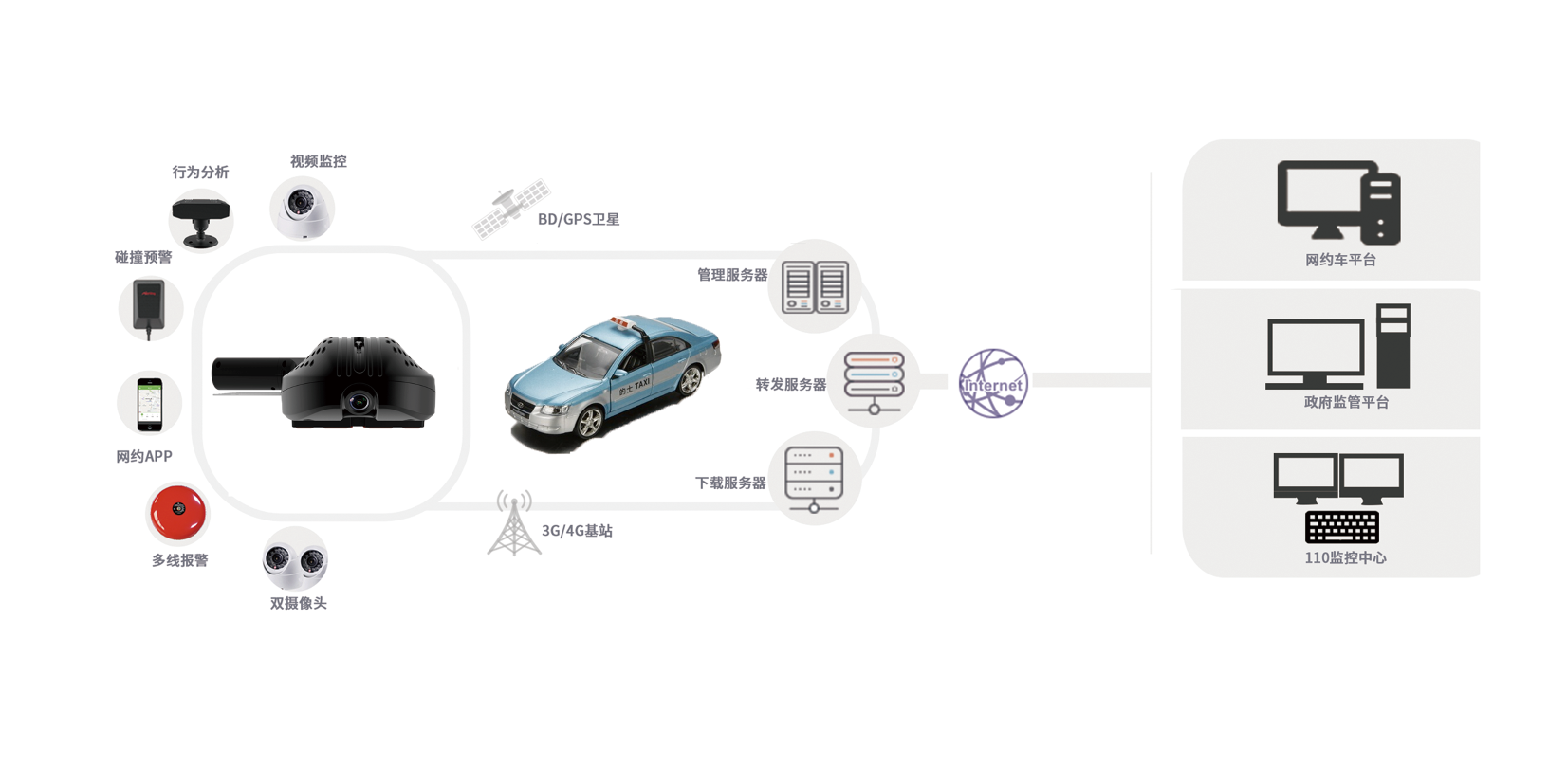
网约车、出租车解决方案
公交车解决方案
客运车解决方案
货运车解决方案
网约车、出租车解决方案
驾驶行为数据挖掘 - Rockman
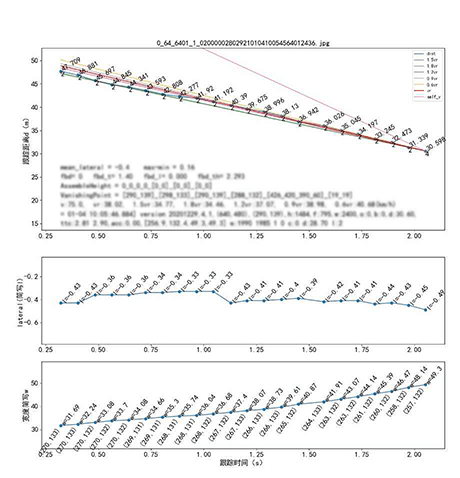
1、驾驶行为分析。收集行驶过程中不同时间窗口的DBW(DMS、DSM)、FCW、PCW、LDW等视觉传感器数据、IMU惯性传感器数据和GPS数据,融合多传感器数据,计算驾驶员的疲劳驾驶和危险驾驶指数,为驾驶安全提供保障,为车队安全管理提供依据,
2、用户画像。在庞大客户群体和海量驾驶数据的支撑下,分析天气、行业、道路、交通状况、行驶时段、行驶路线等因素对驾驶安全的影响,对驾驶员历史驾驶轨迹和驾驶行为进行全方位数据挖掘,刻画清晰的用户画像,为UBI车险定价和核保提供重要的数据支持。
3、驾驶决策学习。对Smarter Data Engine收集的海量真实驾驶轨迹进行学习,结合视觉感知和高精地图信息,学习人的驾驶行为,用数据代替规则,实现数据驱动的驾驶决策技术。以数据驱动实现复杂场景下的驾驶决策,更贴近驾驶员的驾驶行为,能够有效提升无人驾驶决策的合理性、安全性和舒适性。

ADAS与自动驾驶 - ADAS TO Autonomous
高精度地图可以帮助自动驾驶车辆进行路径规划、高精度定位、精确感知和决策等,是自动驾驶技术的重要支撑。
1、ADAS到HD Map。通过ADAS Faster Vision Perception提取的道路2D图像语义,融合GPS和IMU数据对周围环境进行3D重建。数十万活跃的车载边缘计算节点代替众包形式,通过Smarter Data Engine回传数据,保证数据鲜度,构建“活”的高精度地图。高精度地图的精准定位可以和车载传感器互补,促进ADAS算法准确率的提升,实现ADAS和高精度地图共赢闭环。
