人工智能 计算机视觉 深度学习
中天安驰的“AI算法”以深度学习、计算机视觉为技术,以解决真实问题为向导,聚焦于智能交通与监控安防领域。自主掌控算法研发、智能终端制造、海量终端数据二次开发,形成算法、硬件、数据的闭环。中天安驰是车载智能硬件的头部制造商之一,具备大规模硬件设计制造实力,销售网络遍及全国,实现科研技术的快速规模化商用落地。
智能车载终端

智能监控相机
以人工智能为核心的商用车信息化、智能驾驶及安防解决方案提供商
中天安驰是一家人工智能公司,以深度学习、计算机视觉为核心技术。在智能车载视频终端(Mobile DVR)领域,我们整合算法、硬件设计与制造,运营销售网络,形成三者的良性闭环,已成为该领域的主要头部企业。中天安驰以智能、稳定、安全的产品理念为核心,为公安全驾驶、智能驾驶、车队管理、智慧交通等行业项目,提供智能硬件、云平台、数据开发等整体解决方案。
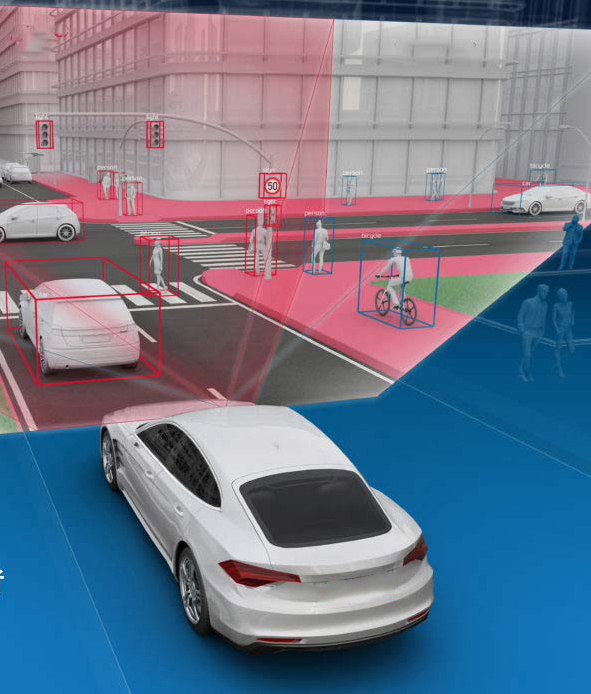
ADAS 高级辅助驾驶
撞车预警、行人预警、车道偏离预警等,有效提高驾驶安全,预防交通事故。
DSM 驾驶员监控
对司机面部进行实时分析,检测预警异常驾驶状态,疲劳、吸烟、接打电话等。
司机画像
对采集的数据运用深度学习、AI人工智能,分析驾驶员的驾驶行为和效率,提升运力。
智能车联网
基于5G/4G与云平台连接,实现北斗/GPS实时追踪、多路摄像头实时录像、多种预警等,实现车队车辆监控、调度、实时安全介入。
智慧交通、安全驾驶
智能终端符合国家和地方交通部门的相关要求,实时采集车辆行驶数据和驾驶行为数据,为政府和企业车队管理、安全运输提供保障。
数据开发
我们的智能终端活跃运行在数十万商用车辆上,实时收集海量行驶环境数据以及驾驶行为数据,为ADAS、自动驾驶等高级应用开发提供基础。
以人工智能为核心的AIOT视频监控解决方案提供商
中天安驰将自研计算机视觉算法、深度学习算法核心技术,应用于自研的智能监控摄像头终端,实现AI+IoT的广泛场景应用。中天安驰以轻量、稳定、安全、智能的视频监控理念为核心,为公共交通、智能家居、连锁企业、智慧社区、阳光校园、透明厨房等行业项目,提供以智能摄像头终端为载体,基于公有云的集中视频监控服务和智慧业务管理服务。
AIoT摄像头
中天安驰自研视觉算法赋能终端
实时视频监控
智能语音交互
按预设自动视频巡检
迅捷人员识别、体态分析
客流统计,客流分析
实时告警,人形检测、移动侦测、人脸侦测等
5G/4G高速联网,远程监控,极速视频
电子地图实现资源分布业务数据可视化
IR夜视红外、防水,稳定,全天候工作
应用领域
智能家居
智能家居
实时掌握家中状态,远程视频,智能报警推送,安心出门
智慧道路
智慧道路
实时掌握公共道路状态,智能人脸识别,人员体态检测,人流统计、维护公共安全,助力智慧交通
连锁商超
连锁商超
视频监控、AI巡店、客流统计、客户群体画像分析,提升门店管理,降本增效
教育培训
教育培训
视频安防,智能入校入园签到,阳光校园,解决家长关心的校园安全问题
社区监控
社区监控
覆盖社区的智能监控系统,实现人员出入检测,人员体态检测,人员追踪,维护社区安全
数据开发
数据开发
基于智能视频终端收集的丰富数据,针对客户行业需求进行深度数据开发,充分挖掘数据价值
合作共赢
江苏中天安驰科技有限公司
深圳公司
南京公司

重庆公司
